.png)
Team Infernope
A three-year evolution of combat robots, each testing new engineering principles—from voltage scaling to modular chassis and energy efficiency. Every robot was a deliberate step in mechanical and electrical design.
Year 1
Horizontal Spinner
Type: Horizontal Spinner
Result: Non-functional design
The first attempt at a combat robot. It never operated successfully but marked the start of experimentation with chassis and drive systems.
Downsides: No functional drivetrain or weapon; lacked understanding of assembly fundamentals.
Lessons Learned: Use proper fasteners and alignments. Begin testing small subsystems before full assembly.
Between Year 1 & 2
Experimental Shell Spinners
Type: Shell Spinner
Result: CAD Practice
Concept CADs of shell spinners developed between Year 1 and 2, focusing on rotational stability and 3D printing feasibility.
Downsides: None were completed due to impractical manufacturing constraints.
Lessons Learned: Learned part balancing and assembly alignment in Fusion 360 and TinkerCAD.
Year 2
Thwack!
Type: Thwack Bot
Result: 1-0-2 at end of year double elim.
A simple thwack bot with interchangeable attachments designed for impact-based defense.
Downsides: No active weapon. Incorrect gear ratio made the drive too slow for effective hits.
Lessons Learned: Learned to design 3D-printed wheel hubs with strong mounting interfaces and high traction; Learned basic modular design.
Between Year 2 & 3
Doomstone
Type: Horizontal Bar Spinner
Result: Practice build
A heavy horizontal bar spinner optimized for kinetic impact. The first fully functional robot with an active weapon.
Downsides: Slow weapon spin-up due to power limits.
Lessons Learned: Always test electrical systems individually to prevent damage from miswiring.
Vert
Type: Duel-Disk Vertical Spinner
Result: Practice build
A large dual-blade vertical spinner, emphasizing upward impact and wedge-driven control.
Downsides: Hard to balance; 3D printing defects caused inconsistent wedge performance.
Lessons Learned: Introduced balancing methods for high-speed weapons and modular wedge interfaces.
Year 3 Semster 1
300g Bot
Type: Vertical Beater Bar(300g)
Result: Eliminated at quals
A 300g beater bar bot designed for weight efficiency while maintaining striking capability.
Downsides: Strong design but unlucky tournament placement.
Lessons Learned: Learned to reduce print weight and utilize weapon vortex for cooling.
90 Degrees
Type: Bristledrive Horizontal Disk Spinner(300g)
Result: Eliminated at round of 32
A bristle-drive horizontal spinner without wheels, relying on vibrations for movement. Exploited weight bonus for a heavier weapon.
Downsides: Extremely slow and hard to control; excessive vibration caused instability.
Lessons Learned: Gained insight into vibration damping and energy absorption in chassis design.
Year 3 Semster 2

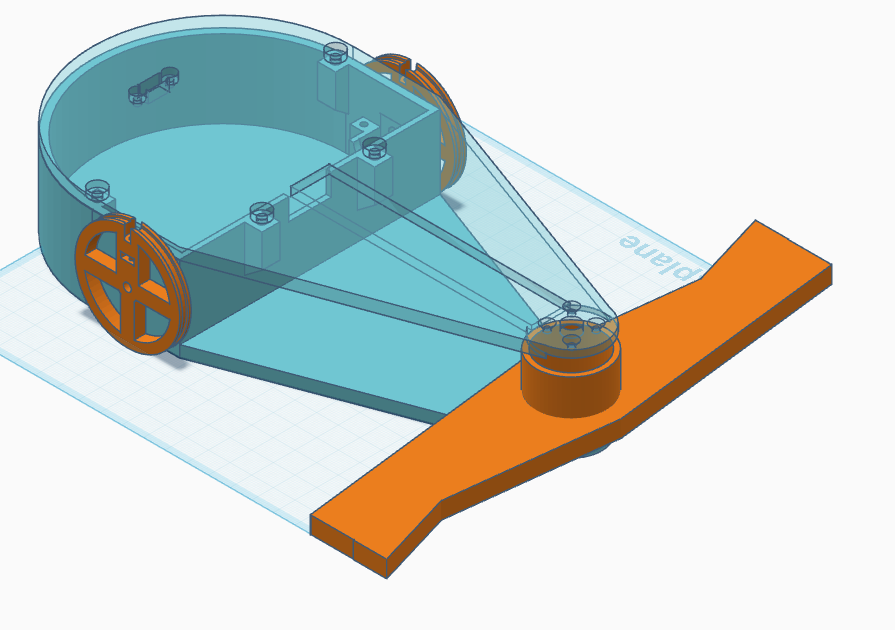
Good Game
Type: Vertical Disk/Bar Spinner
Result: 1st place @ End-of-Year Tournament
My flagship vertical disk spinner with swappable wheels, weapons, and attachments for opponent-specific optimization.
Downsides: Underestimated weapon forces led to broken bolts and bearings.
Lessons Learned: Discovered modular part design and belt-driven isolation for motor protection.

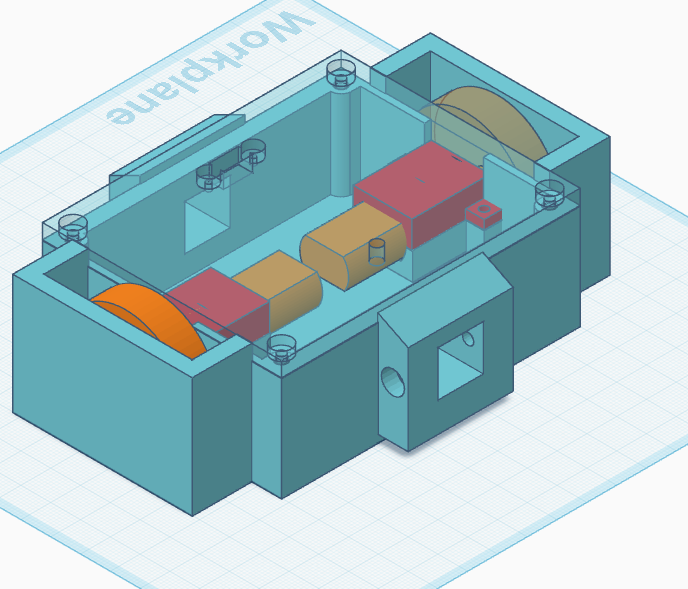
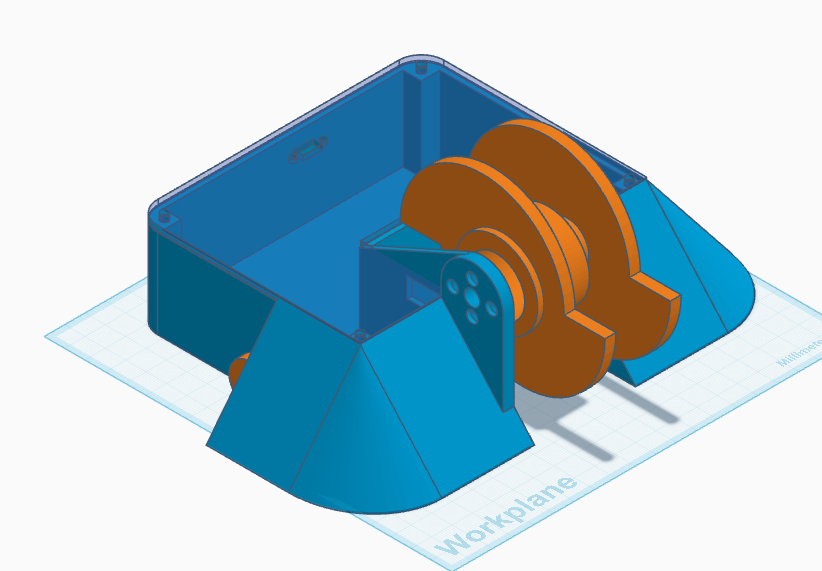
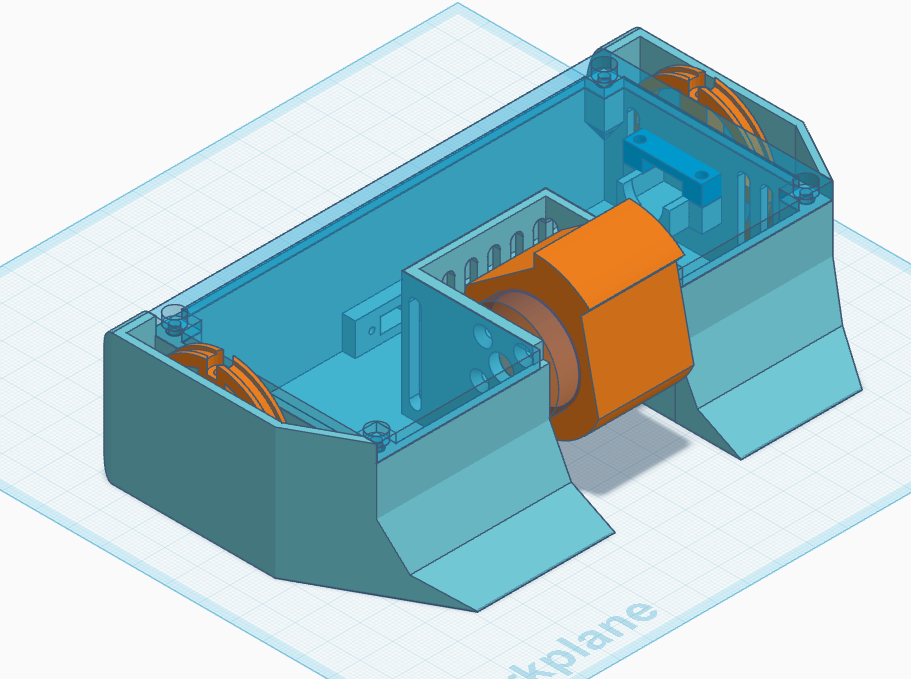
MAD
Type: Horizontal Bar Spinner
Result: 2nd place @ End-of-Year Tournament
An upgraded horizontal spinner running a 6S system instead of 3S, doubling voltage for higher energy output.
Downsides: Faulty belt system limited weapon to 30% power.
Lessons Learned: Learned multi-voltage integration: 12V drive and 24V weapon systems.
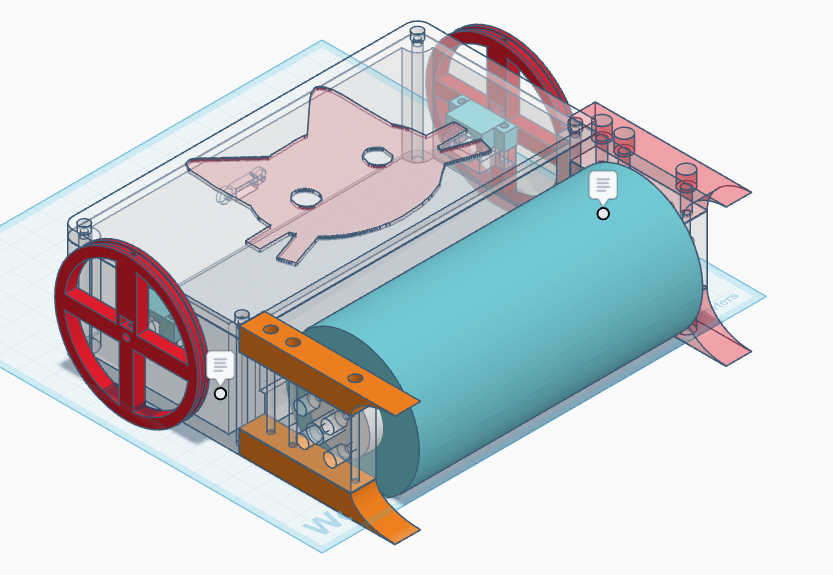
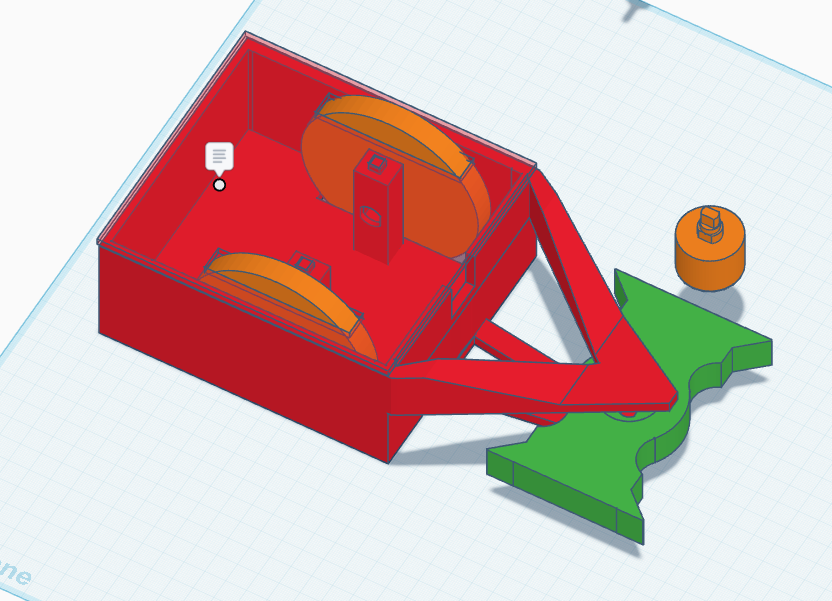
Hello Kitty
Type: Drum Spinner
Result: 3rd place @ End-of-Year Tournament
A small egg-beater robot built in 3 days for a rapid design challenge.
Downsides: Weapon spun in the wrong direction initially; later failed due to incorrect print orientation.
Lessons Learned: Experience in designing under time constraints without prototype testing.
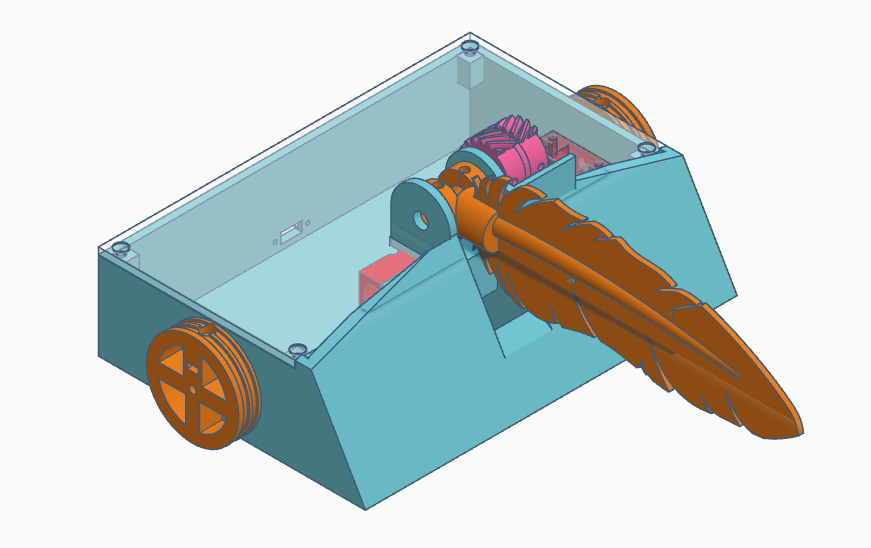
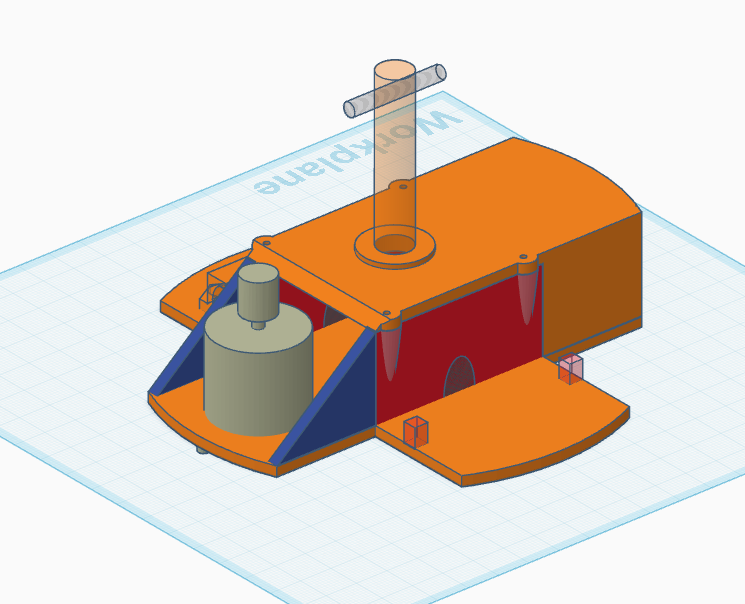
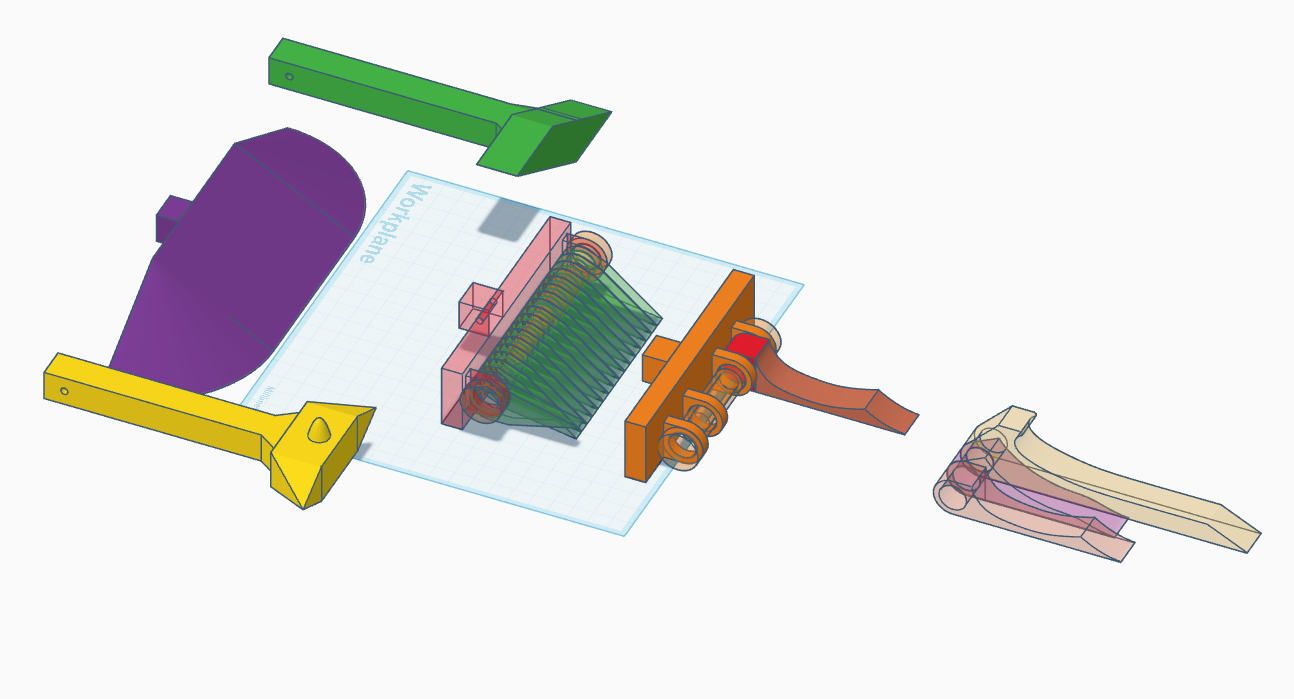
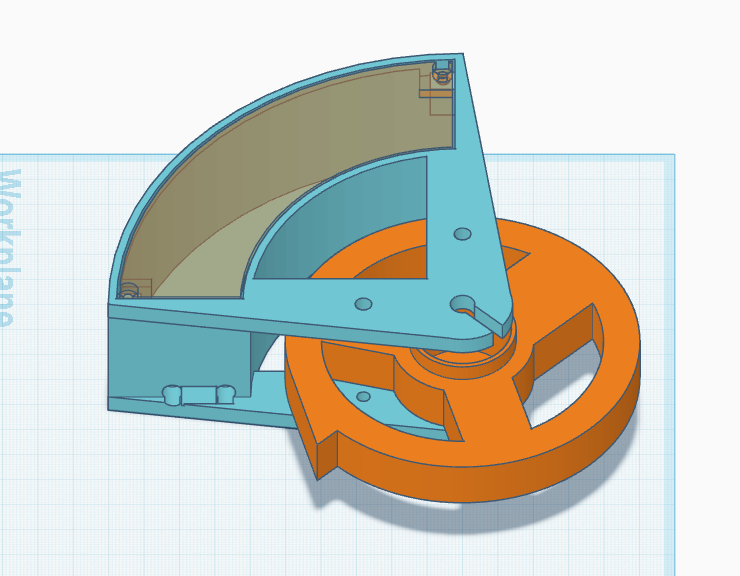
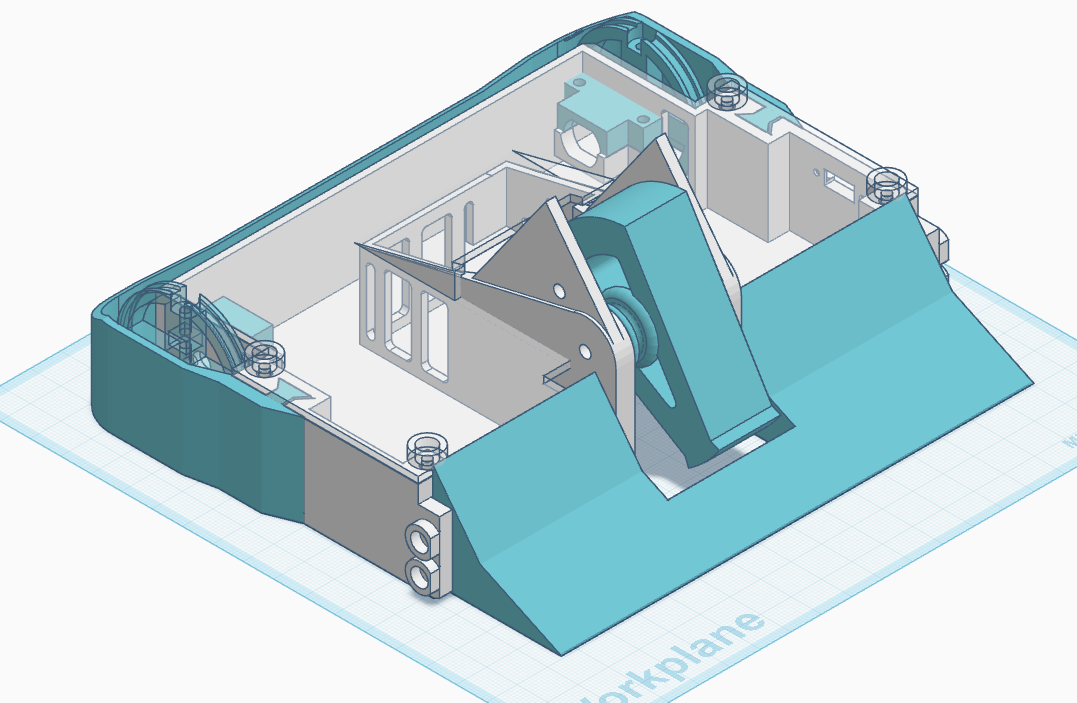
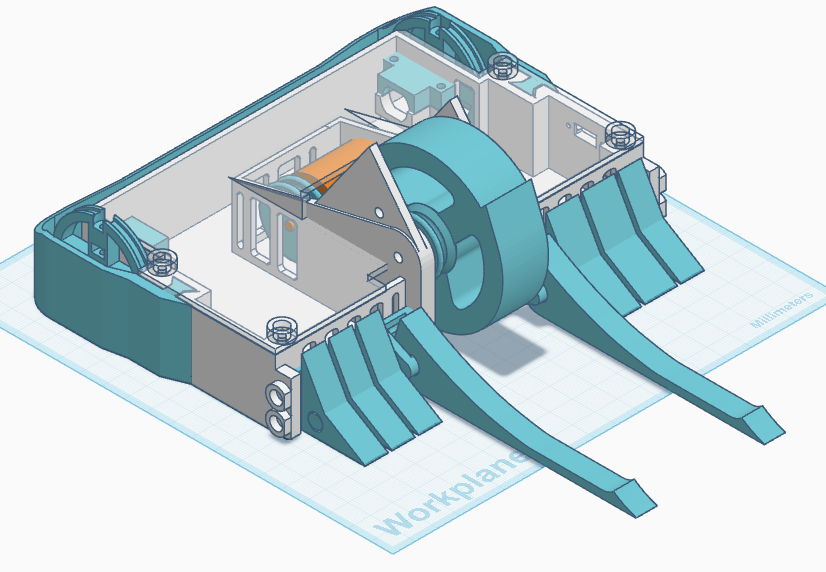
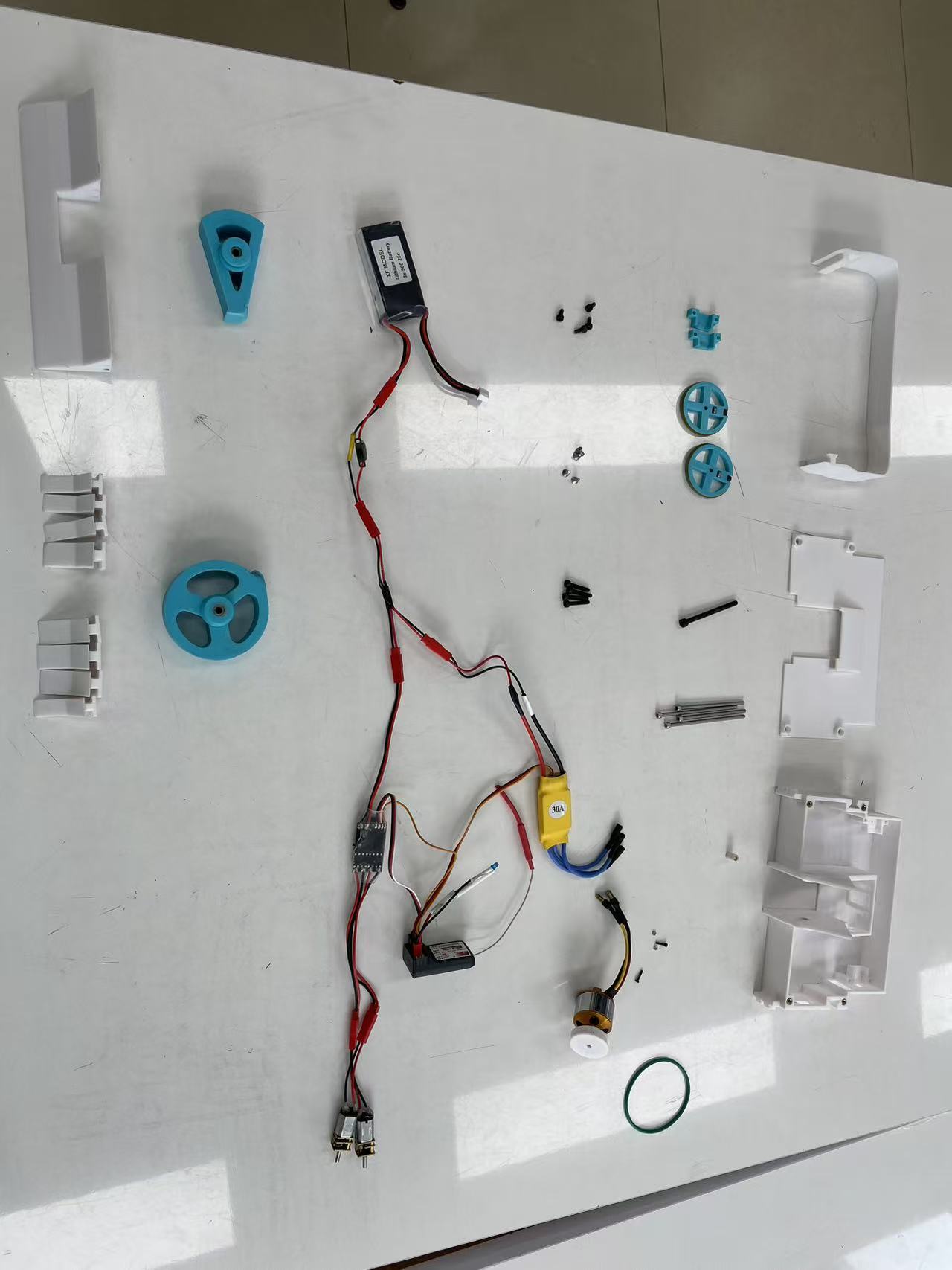
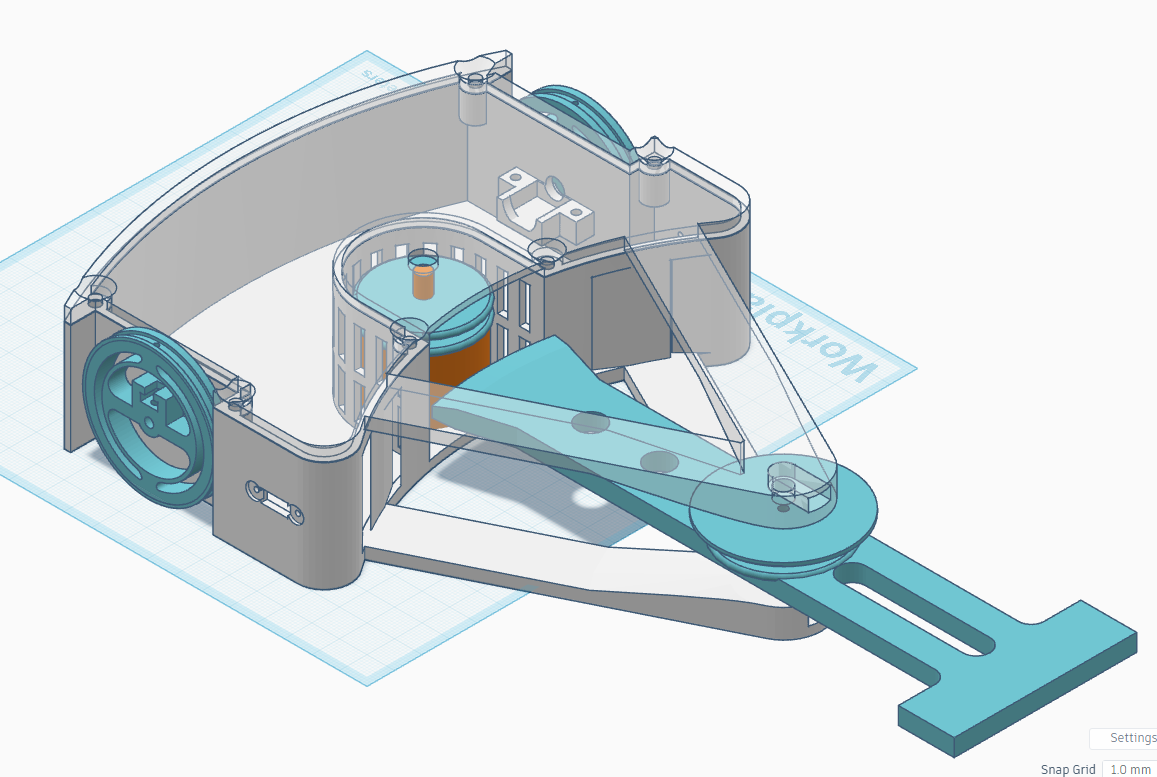
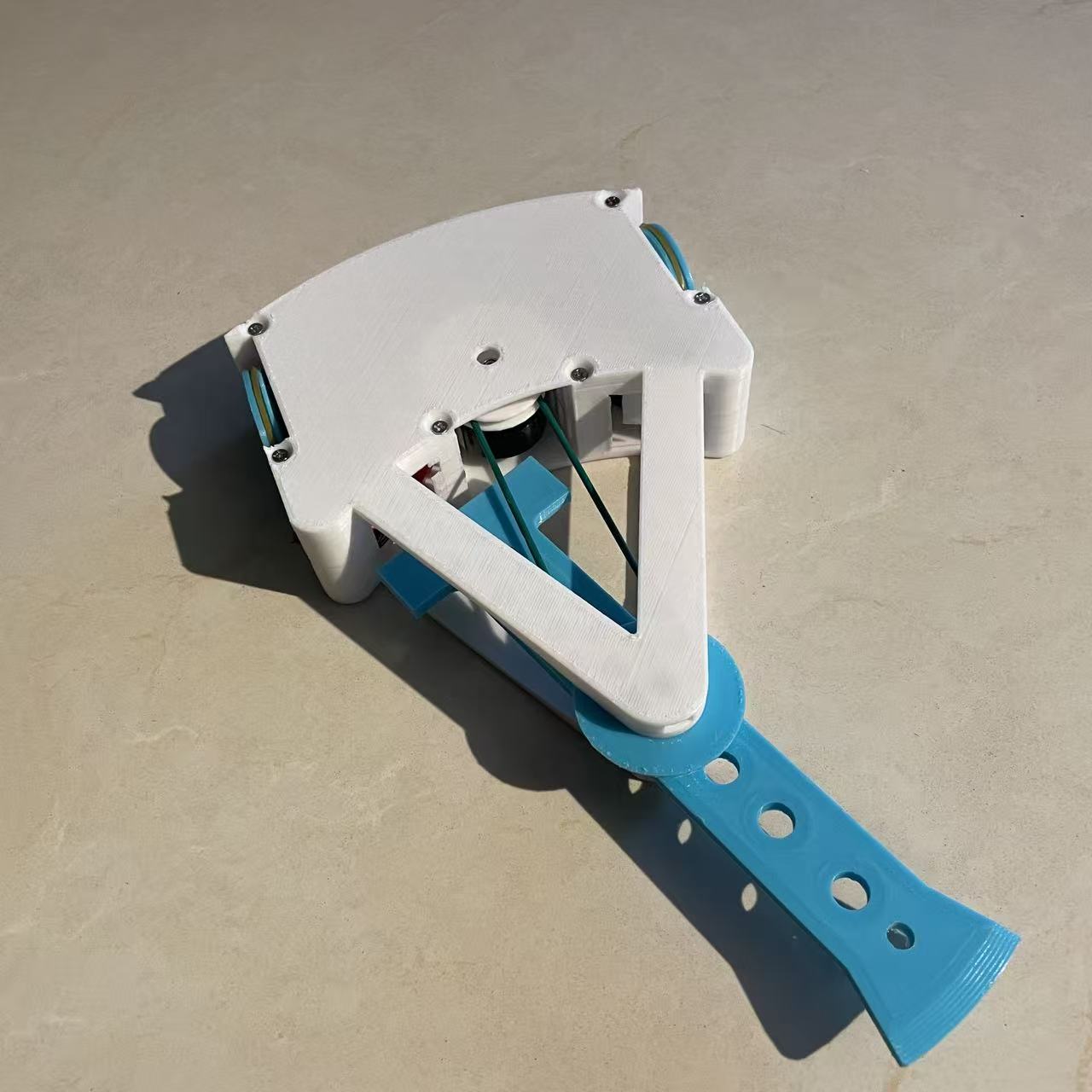
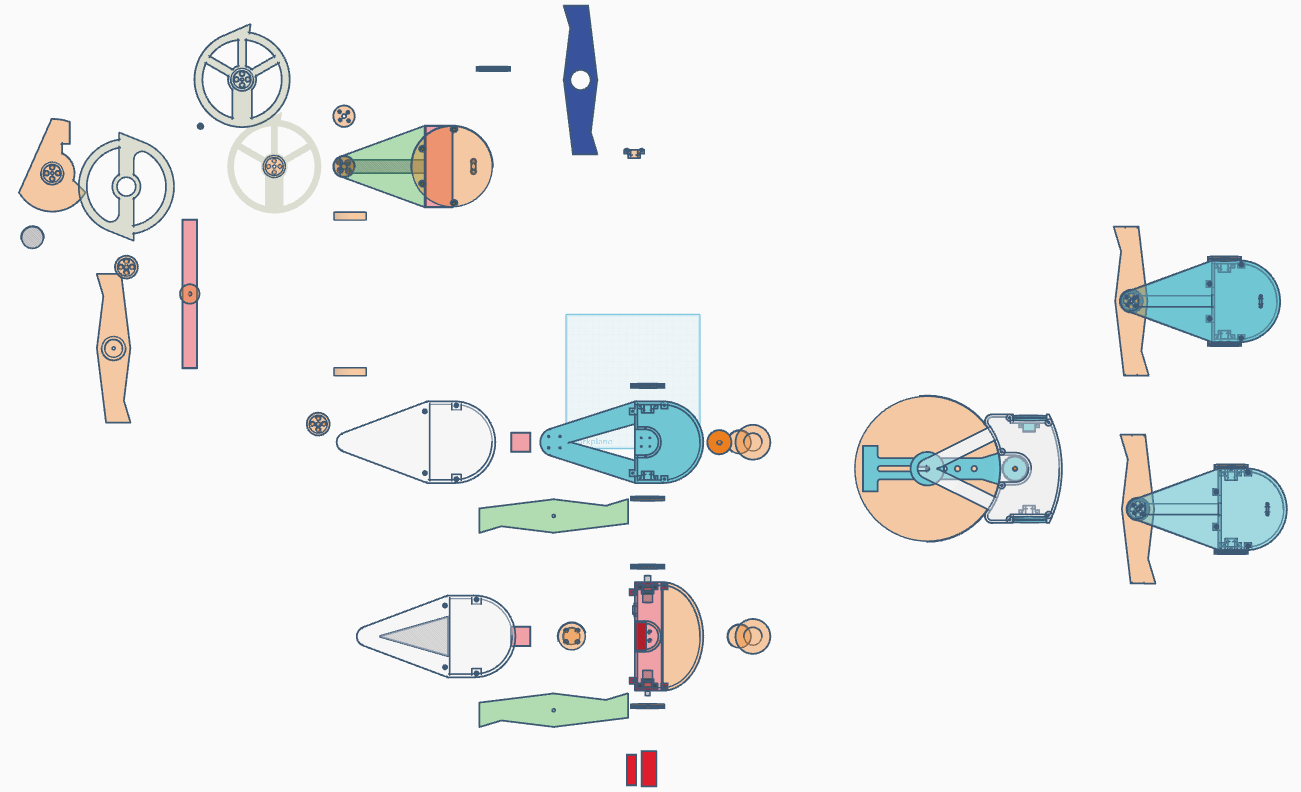
The Reynolds Pamphlet
Type: Hammer Bot
Result: 4th place @ End-of-Year Tournament
A hammer bot using a torsion spring and sector gear for automatic release. Focused equally on aesthetics and function.
Downsides: Torsion spring too weak, causing low strike energy.
Lessons Learned: Learned brushed DC motor weapon control and integrated gearbox packaging.
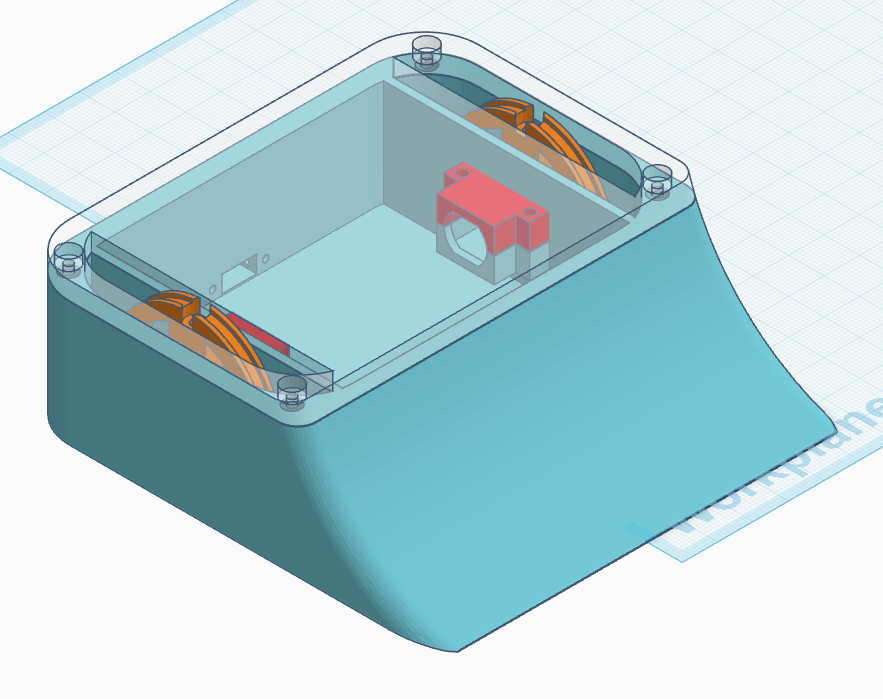
One and Two
Type: Multibot Wedge
Result: 6th place @ End-of-Year Tournament
2 smaller 225g wedge robot in a multi-bot configuration.
Downsides: No active weapon.
Lessons Learned: Designing multiple independent systems.
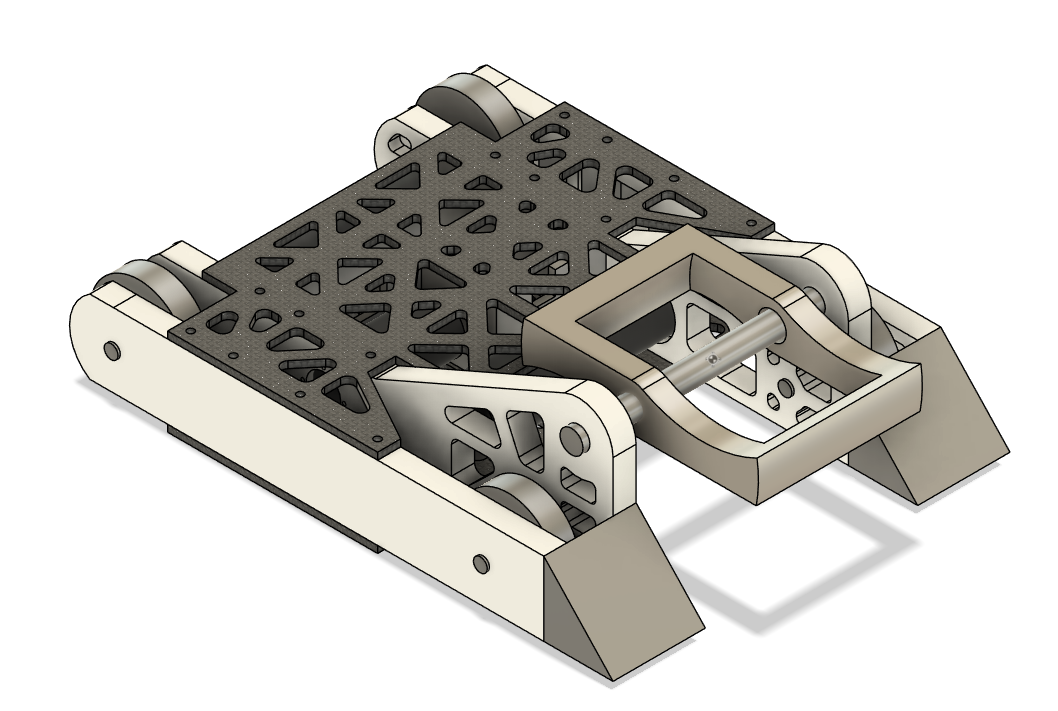
Riptide
Type: Egg Beater(3lb)
Result: CAD Practice
A 3lb egg-beater inspired by Riptide (BattleBots) and Ares (NHRL).
Downsides: Never manufactured due to time constraints.
Lessons Learned: First robot fully designed in Fusion 360 using mixed materials: UHMW and carbon fiber.
After year 3
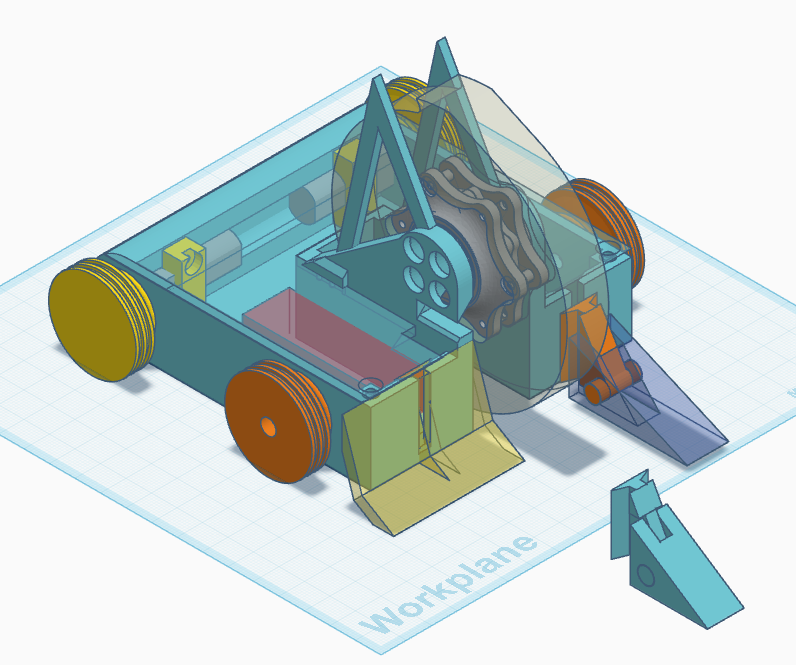
OP
Type: Vertical Disk Spinner
Result: Practice Build
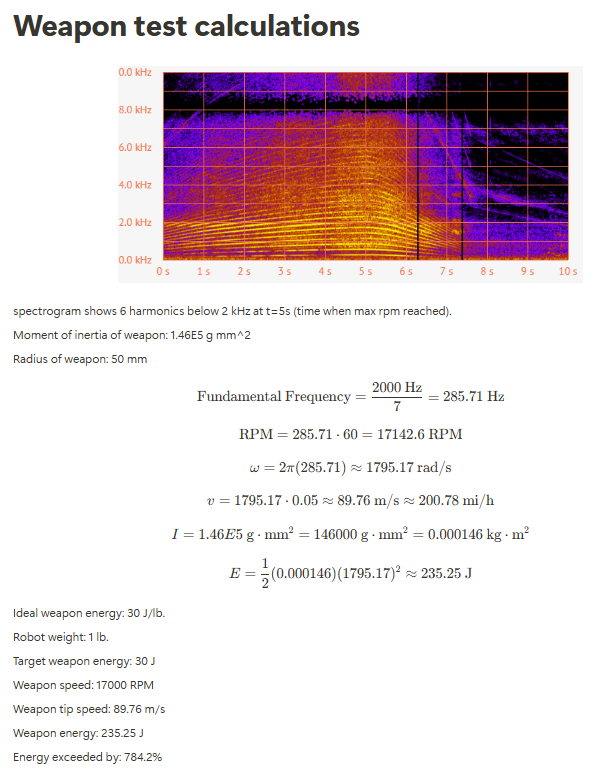
A final post-transfer project. Optimized for rotational inertia, storing 200+J of kinetic energy in the weapon.
Downsides: Never competed; gyroscopic forces effectively prevents turning at >50% weapon speed.
Lessons Learned: Learned to use hub motors for drive and implemented rubber band–linked 4WD system.