Aetherius GCS
Mission planning and live telemetry for the Aetherius UAV project.
Aetherius GCS
Full-stack mission planning + live telemetry dashboard. Hosted via LAN, supports multi-display.
Frontend
React + Tailwind
Custom UI
Backend
Python FastAPI
Mission planning & control
Protocols
MAVLink, WebSocket
Pixhawk ↔ Pi ↔ Backend ↔ Frontend
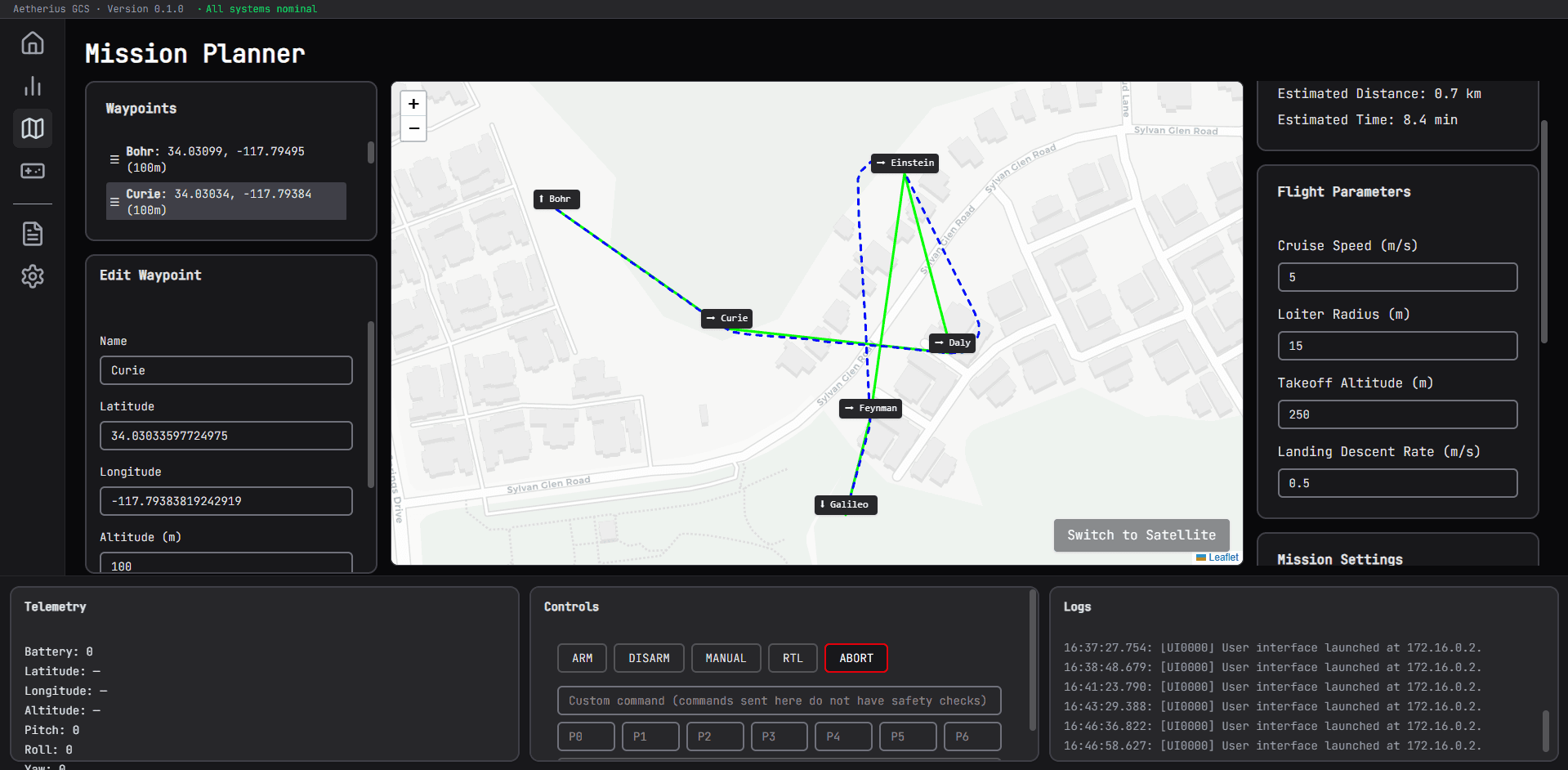
Delivered Features
- Mission editor: map + form, reordering, Dubins/straight legs.
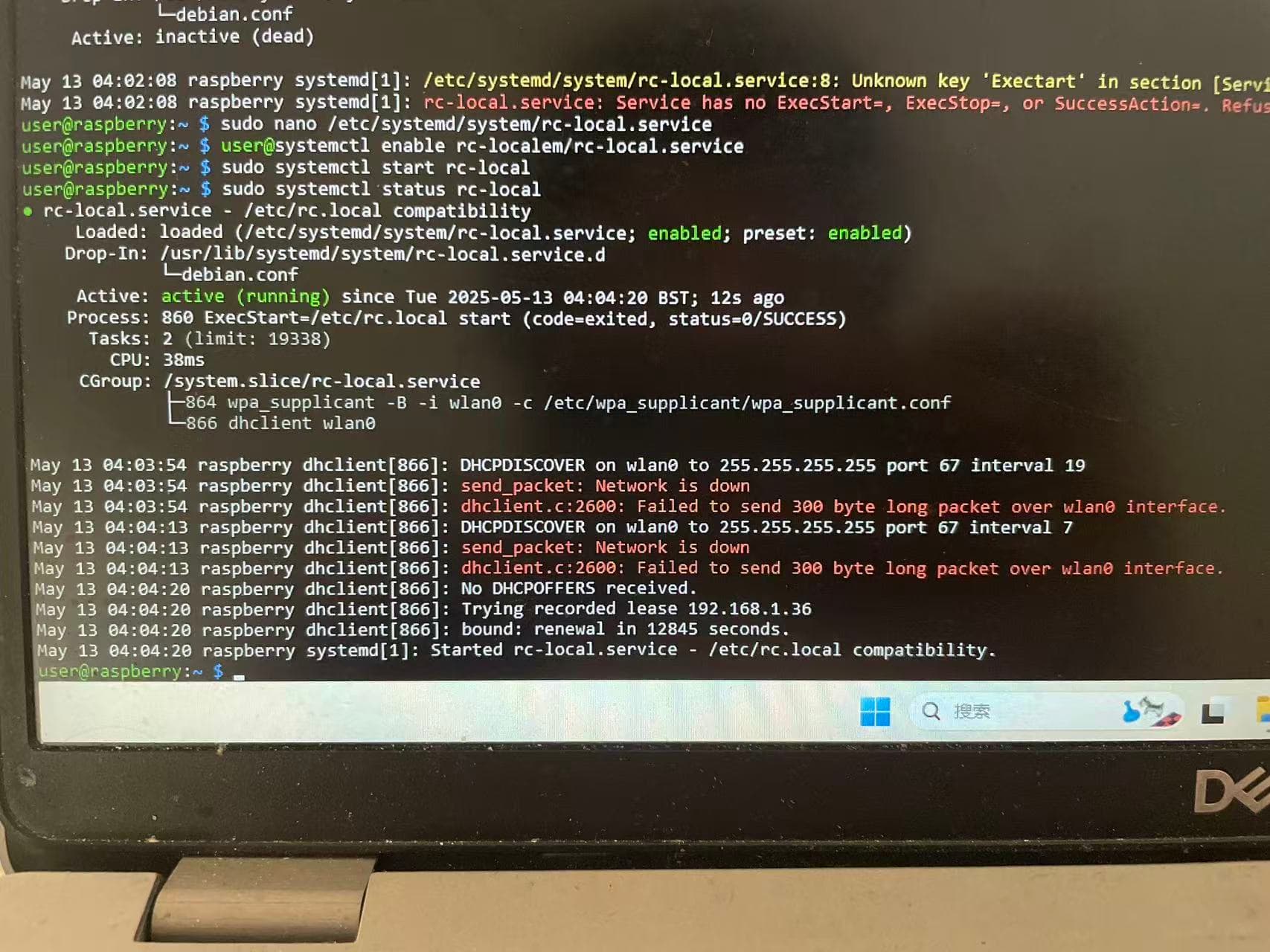
- Network: full end-to-end link from flight controller to frontend.
- Telemetry: automatic connection and data streaming.
- Control panel: persistent pre/post-mission command bar.
Roadmap
- Mission upload/download
- Mission execution
- LiDAR integration
GCS Interface Previews